The Jitterbug
Motion
By
Robert W. Gray
180-4 Poplar St.
Rochester, NY 14620
Copyright, September 2002
09-29-2002
Introduction
We develop a set of equations which describes the motion of a triangle and a vertex of the Jitterbug. The Jitterbug starts in the “opened” position of a Cuboctahedron (also called the Vector Equilibrium or VE) with 8 triangle faces, 6 square faces, and 12 vertices, and “closes” into an Octahedron position with 8 triangle faces and 6 vertices. (See Figure #1.)
The Jitterbug motion is visually complex but simple when you focus only on the motion of one of the 8 triangles. The motion of a triangle is simply a radial displacement plus a rotation around the radial displacement vector. Because the triangular faces do not change size as they move radially and rotate, the 3 vertices of a triangle are always on the surface of a cylinder. (See Figure #2.) The cylinder is axially aligned with the displacement vector. That is, with a line passing through the Octahedron’s (and VE’s) center of volume out through the triangle’s face center point. There are 4 axes of rotation (two opposite triangular faces per axis) so there are 4 fixed cylinders within which the triangles move.
The reason that the motion appears complex is because the Jitterbug is often demonstrated by holding the “top” and “bottom” triangles fixed while pumping the model. This causes the remaining 6 triangles to move radially in and out, rotate and orbit about the “up” and “down” pumping axis. By allowing all 8 triangles to move in the same way, that is, not fixing any of the 8 triangles, the motion is simplified.
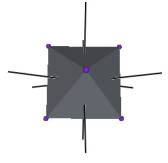
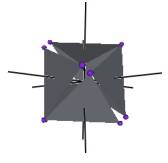
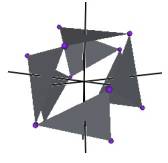
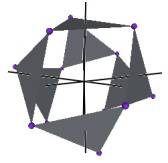
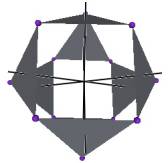
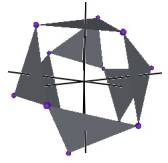
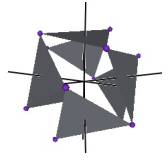
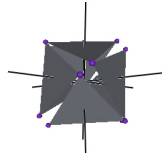
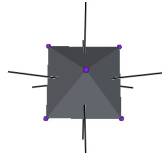
Figure #1 Jitterbug Motion
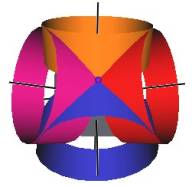
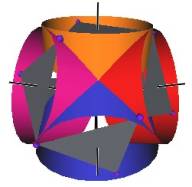

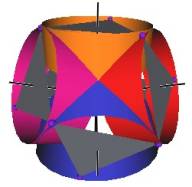
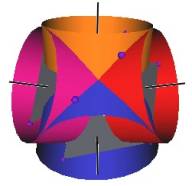
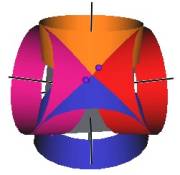

Figure #3 Path of a vertex
In Figure #3 we can see a portion of this ellipse as well as one triangle of the Jitterbug in the Octahedron and the VE position. The ellipse shown is in the YZ-plane. The surrounding cylinder is along the V-axis.
Note that since the Octahedron is centered at (0, 0, 0) then so too is the ellipse.
The equation of an ellipse, centered at the coordinate origin (0, 0, 0), is given by
![]()
where a = semimajor axis length and b = semiminor axis length.

Figure #4 Semimajor and semiminor axes lengths
From Figure #3, we see that the semimajor axis length, from the coordinate origin to the vertex of the VE positioned triangle, is the edge length of the Tetrahedron (and of the VE) defined by the VE triangle and the center of volume. This length is given by
a = EL
Note that since the ellipse is defined on the surface of the cylinder, then the ellipse width must match the cylinder diameter. This means that the semiminor axis length is just the radius of the cylinder, which is the distance from the face center of a triangle to its vertex
![]()
We can now write the equation for the ellipse which a vertex of the Jitterbug will follow.
(1) 
where EL is the edge length of the Octahedron, which is also the edge length of the VE.
![]()
Using the above values for a and b:
a = EL
![]()
we get
b2 / a2 = (1/3) / 1 = 1/3
so that
The coordinates for the 2 focus points are (0, ae) and (0, –ae) in the YZ-plane. These evaluate to
and
The usual motion of the Jitterbug consists of the vertices moving from the Octahedron to the VE position and back to the Octahedron position. Then only a portion of the ellipse is traversed by the vertices.

Figure #5 Jitterbug portion of ellipse

Figure #6 Orientation of the axes

Figure #7 Orientation of ellipse and cylinder
We will shortly derive relations which will let us convert a Jitterbug’s triangle angular rotation g from the ellipse radius sweep angle q and visa versa.
(Note that I am using the term ellipse “radius” very loosely here. The ellipse does not have a radius. However, the word “radius” makes it easy to refer to a line segments with one end at the coordinate origin and the other end on the perimeter of the ellipse.)
Considering Figure #7, we have defined the ellipse to be in the YZ-plane. The cylinder has its axial symmetry axis along the V axis and the W axis of the cylinder is perpendicular to the V and to the Y axes. The left side of Figure #7 is rotated about the Z axis to get the right side of the Figure.
Note that both coordinate systems (X, Y, Z) and (W, Y, V) share the same Y-axis.
We now want to calculate the Z and Y component of the ellipse radius r, which has been rotated by the angular amount q about the X-axis (so it remains in the YZ-plane.)
From the ellipse equation above, we can write
(2) 3Y2 + Z2 = EL2
r2 = Y2 + Z2
and that
r cos(q) = Z
so
r2 = Z2 / cos2(q)
![]()
![]()
The angle which the YZ-plane makes with the V axis is labeled a in Figure #3. This is the half-cone angle of the Tetrahedron in the VE. This angle is known to be
which makes the angle b (see Figure #3)
We then have

![]()
Now,
W = Z cos(b)
Using this in equation (2) we get
(2) 3Y2
+ Z2 = EL2
Y2 = (1/3)EL2 – W2
With
tan(g) = Y/W
so that
tan2(g) = Y2/W2
we get
![]()
![]()
![]()
We can use a trigonometric identity
tan2(A) = (1/cos2(A)) – 1
to rewrite this as
(1 / cos2(g)) – 1 = 3( (1 / cos2(q)) – 1 )
(1 / cos2(g)) – 1 = (3 / cos2(q)) – 3
1 / cos2(g) = (3 / cos2(q)) – 2
1 / cos2(g) = (3 / cos2(q)) – 2 cos2(q) / cos2(q)
1 / cos2(g) = (3 – 2 cos2(q)) / cos2(q)
cos2(g) = cos2(q) / (3 – 2 cos2(q))
![]()
Solving for cos(q), we get
We can then write Z as a function of the Jitterbug rotation angle g
![]()
![]()
![]()
![]()
![]()
We now calculate the position of the Jitterbug triangle along the V-axis. This is the axis around which a single triangle rotates and moves radially.
From Figure #7 we have
V = Z sin(b)
Which means
(3) 
This equation gives the distance that the Jitterbug triangle is from the center of volume as it rotates around the V-axis. The angular range is – 60° £ g £ 60°, with g = – 60° is one Octahedron position, g = 0° is the VE position and g = 60° is the other Octahedron position.
The Jitterbug Ellipses
In Figure #8, the “Jitterbug portion” is the actual path that vertices will travel (direction of travel is not considered here.) No vertex of the Jitterbug (when considering only the Octahedron to VE to Octahedron motion) traverses that portion of the ellipse curve which is within the “Square cross section of Octahedron” portion of the ellipse. (See Figure #8.) Later in this paper we will consider what happens if the vertices are allowed to move around the complete ellipse.
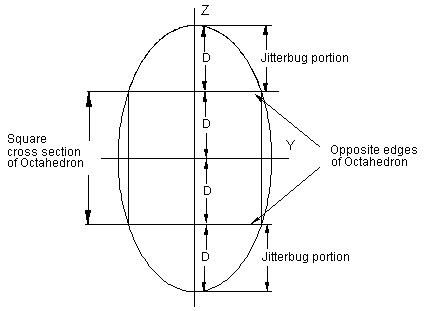
Figure #8 Ellipse and Octahedron edges
Figure #8 shows the complete ellipse in the YZ-plane with the usual Jitterbug vertex path portion of the ellipse marked. In the following sections of this paper we will explore the consequences of allowing the vertices of the Jitterbug to orbit around the entire ellipse.
Note that there are 2 diametrically opposite Jitterbug vertices per ellipse which travel in the same direction. So there are two “Jitterbug portions” to the ellipse. Since there are 12 vertices to the Jitterbug (not in the Octahedron position) then there are 12/2 = 6 total ellipses for the Jitterbug.
Note that the angular range traversed by a vertex along the ellipse in the YZ-plane is
– 45° £ q £ 45°
All four of the square’s edges in the ellipse of Figure #8 are Octahedron edges. Each pair of opposite edges of the Octahedron is part of an ellipse. Therefore, there are two orthogonal ellipses in the same plane. Figure #9 shows both ellipses defined by the motion of 4 Jitterbug vertices.

Figure #9 Two ellipse per plane
Following only one vertex (one vertex of a rotating Jitterbug triangle) and with the Jitterbug in the Octahedron position, we label the initial vertex position “P1” . This vertex will travel along the ellipse, passing through an Icosahedron position, to reach vertex position “P2”, the VE vertex position. Then, with the Jitterbug triangle continuing to rotate in the same direction, the Jitterbug vertex passes through another Icosahedron vertex position to reach the Octahedron position “P3”. (Further details relating the Jitterbug vertex position along the ellipse and various polyhedra are given below.) Note that if the Jitterbug triangles were allowed to continue to rotate in the same direction then the vertex now at vertex position “P3” would not proceed to vertex position “P4”. Instead, is leaves this plane to follow another ellipse.
The Octahedron has 12 edges forming 6 opposite edge pairs. So there are a total of 6 ellipses to define the complete Jitterbug motion. These 6 ellipses are show in Figure #10 and Figure #11.




Figure #10 Six ellipses and Octahedron




Figure
#11 Six ellipses and the VE
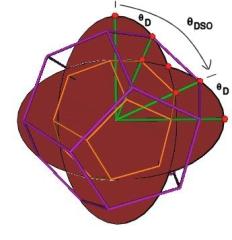
It is well known, and as mentioned above, that the Jitterbug vertices pass through an Icosahedron position during its Jitterbug motion. (See Figure #12.) What is not well know is that the Jitterbug vertices also pass through a regular Dodecahedron position along the ellipses. (See Figure #13.)


Figure #12 Jitterbug in Icosahedron position




(3) 
(4) 
![]()
![]()
![]()
![]()
![]()

So,

which is the angle about the X-axis that the ellipse radius rotates to the Icosahedron position.
To calculate the angular rotation of the Jitterbug triangles for the regular Dodecahedron position, we first find the radial position of one of the Jitterbug’s triangles when in the Dodecahedron position.

where ![]() .
.
![]()
(4) 
![]()
![]()
![]()
![]()
![]()
Sub-Octahedron Zone
As mentioned above, with physical, solid triangles, a Jitterbug’s vertex does not follow the complete path of an ellipse. We now remove this constraint and let the vertices travel along the complete elliptical path. There are then two alternatives for Jitterbug triangle motion:
1) When the Jitterbug triangle reaches the Octahedron position (from the VE position) they continue to rotate in the same direction, reverse their radial direction of motion, and change size as the vertices traverse the sub-Octahedron zone of one of the 6 ellipses,
2) When the Jitterbug triangle reaches the Octahedron position (from the VE position) they continue to rotate in the same direction, continue to move in the same radial direction (toward the center of volume), and do not change size.
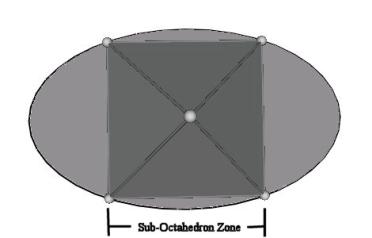
Figure #18 The sub-Octahedron Zone of ellipse
We consider the first case here. In the next section we consider the second case.
Beginning in the Octahedron position, the vertices are now to travel within the sub-Octahedron zone of the 6 ellipses of the Jitterbug. As shown in Figure #19, each of the Octahedron’s vertices split into 2 vertices and the diametrically opposite vertices, on the same ellipse, travel in the same direction.









Note that the 3 vertices of a triangle have switched ellipses. That is, in going from the original VE position to the original Octahedron position, a vertex of a triangle follows a particular ellipse. For the triangle to continue to rotate and to remain on some elliptical path, the vertex of the triangle switches to one of the other 3 ellipses which pass through the same Octahedron vertex position. The vertex, having switched, can now travel along the sub-Octahedron zone portion of an ellipse.
In one sub-Octahedron zone position it is seen that the Jitterbug forms another, smaller VE. (See Figure #19.) Being another VE configuration, we can draw another pair of smaller ellipses within the original ellipses. This construction of another sub-VE within the original VE by following the ellipse paths can be continued to form sub-sub-VEs, etc. and therefore sub-sub-Jitterbugs.

Figure #21 First sub-Jitterbug ellipses
As Figure #21 shows, the Octahedron vertex at P1 is moved to position P2 along the sub-Octahedron zone of the original ellipse. Again, this is not part of the normal Jitterbug motion and is accomplished by a continuous change in scale of the triangles. From P2, a sub-VE position, the vertex may either continue along the original ellipse or it may smoothly switch to the smaller embedded ellipse and move to P3. P3 is a sub-Octahedron vertex position. The motion from P2 to P3 is a normal Jitterbug motion, i.e. without scaling.
As before, we can map out the various polyhedra positions of the Jitterbug motion as its vertices traverse the sub-Octahedron zone. This is shown in Figure #22 and Figure #23.

within sub-Octahedron Zone of ellipse

Figure #23 Dodecahedron, Icosahedron and VE positions
From the original, large VE, (maximum radial distance from the center of volume) a triangle will move radially inward and rotate to the original, large Octahedron position. To then move to the sub-VE position, the triangle must reverse its radial direction (it moves radially outward) rotate (in either the same direction or opposite direction) and change scale (shrink in size.)
The path that a vertex will follow in the sub-Octahedron zone of the YZ-plane is just the edge of the original ellipse rotated 90 degrees. See, for example Figures #19 and #21 which show the 2 ellipses in the same YZ-plane, one rotated 90 degrees to the other.
The equation for the rotated ellipse in the YZ-plane is
From which we get
Y2 = EL2 – 3Z2
Now,
r2 = Y2 + Z2
r cos(q) = Z
r2 = Z2 / cos2(q)
![]()
Z2 (1 + 2cos2(q)) = EL2 cos2(q)
![]()
To write this in terms of the angular rotation of the Jitterbug triangle g, we again use

![]()
As before, the radial position of the Jitterbug triangle (which moves radially along the V-axis) is given by
V = Z sin(b)
And since

we have
where the angular range is now -60° £ g £ 60° about the V-axis.
When the triangle is rotating from the original Octahedron position to the sub-VE position, the scale of the triangle is decreased. When the triangle further rotates from the sub-VE position to the second Octahedron position, the scale of the triangle increases back to its original size.
We now determine an equation for these scale changes.
The Scale Factor by which the original sized Jitterbug is reduced is given by the equation
![]()
where DFV(g) is the Distance from the triangle’s Face center to its Vertex, which is now changing as a function of the angular amount the triangle is rotating g. DFVO is the original Octahedron’s Distance from the triangle’s Face center to its Vertex. Since
DFVO = EL / sqrt(3), we have
We have
DFV(g)2 = W2 + Y2
Now,
W = Z cos(b)
and cos(b) = 1 / sqrt(3), so
![]()
Using Y2 = EL2 – 3Z2 from above, we get
![]()
![]()
or
![]()
The Scale Factor equation then becomes
At g = 0°, which is the sub-VE position, the Jitterbug is reduced by a factor of
![]()
An alternative calculation for the sub-VE position can be calculated by noting that position P2 is at the semiminor axis position of the larger ellipse and is the semimajor axis position of the smaller ellipse. Therefore, the Jitterbug in the sub-VE position is reduced by the scale factor (SF)
SFVE = small ellipse semimajor axis / large semimajor axis
= large ellipse semiminor axis / large semimajor axis
![]()
![]()
The Scale Factor for the Dodecahedron position of the Jitterbug is now calculated.
Recall that the angle of rotation of the Jitterbug triangle for the Dodecahedron position is
![]()
![]()
![]()
Now for the Icosahedron’s scale factor.
We know that the rotation angle for the Icosahedron position is
so that
![]()
Then
![]()
And with t2 = t + 1, we get
SFI = 1 / t @ 0.618033988….
Alternative Sub-Octahedron Zone Motion
There is another way for the vertices of the original sized Jitterbug to traverse the sub-Octahedron zone portion of the ellipse. With this alternative method the triangles do not change scale and they continue to move radially inward. This can be accomplished by allowing the triangles to interpenetrate one another. See Figure #24. Note that the triangles’ vertices are still paired. That is, the triangles are still joined together.
As Figure #24 shows, the same sequence of polyhedra (Dodecahedron, Icosahedron, VE) occur as in the previous case.
When the vertices are in the VE position, the 8 Jitterbug triangles all have their face centers at the coordinate origin (0, 0, 0).
For the vertices of the Jitterbug to traverse the sub-Octahedron zone (starting from the “closed” Octahedron position), the triangles rotate an additional 30 degrees (about the V-axis) to the sub-VE position and another 30 degrees from the sub-VE to the second original Octahedron position. From the Octahedron to sub-VE position, the triangles move radially inward a distance of
![]()
which places all 8 triangles of the Jitterbug at the coordinate origin (0,0,0). From the sub-VE position to the second original Octahedron position, the triangles have passed through the coordinate origin and have moved outward a distance of DVFO.
Note that these rotations are half that of the original Jitterbug motion (the non-sub-Octahedron zone motions) but that the total radial displacement from the original Octahedron to sub-VE position is the same as the total radial displacement from the original Octahedron to the original VE position.
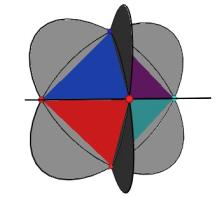
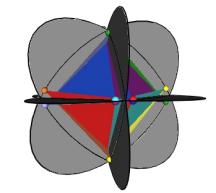
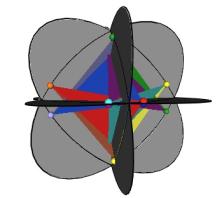
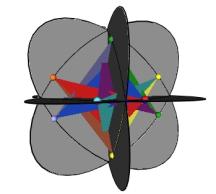
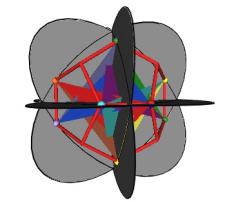
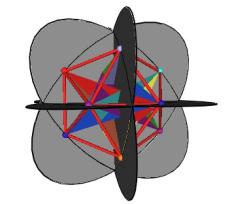
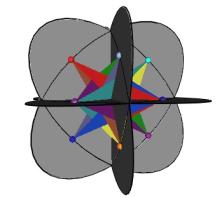
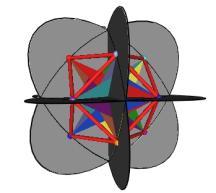
Figure #24 Triangles are allowed to interpenetrate
We now develop equations for the vertex motion along the sub-Octahedron zone.
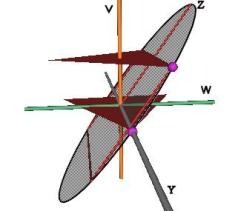
Figure 25 Orientation of ellipse and axes
(3) 
![]()
![]()
![]()


![]()


Additional Comments
The Jitterbug ellipse is such that it passes through 6 vertices of the combined odd-even FCC lattices.
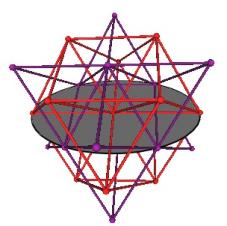
Figure 27 Ellipse in odd-even FCC combined lattice
In Figure #27, the red is the even (vertex centered) FCC lattice and the purple is the odd (Octahedron centered) FCC lattice.
Two Jitterbugs can not share the same triangular face and have their positions (location of center of volume) fixed as they go through the Jitterbug motion. If two Jitterbugs are to share the same triangle face then as the joined Jitterbugs jitterbug, the positions of the Jitterbugs must move.
As Fuller points out, when in the Octahedron position, it is possible to “twist” the Jitterbug to make it collapse and lay flat. It can then be folded into a Tetrahedron.
There are many Jitterbugs, of various sizes, in the 120 Polyhedron. The planes of the initial 5 Jitterbugs of the 120 Polyhedron align with the planes of the great circles of polyhedra rotational symmetries which define the 120 spherical triangles on a sphere.
One way to look at an ellipses on the surface of the surrounding cylinder is to recognize that the equation
is simply a cosine wave wrapped around the cylinder. There are 3 such cosine waves wrapped onto the surface of a Jitterbug cylinder corresponding to the 3 vertices of a Jitterbug triangle.
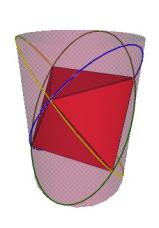
Figure #29 Three Jitterbug ellipses on a cylinder
Summary
The vertices of the Jitterbug triangles move on elliptical paths.
There are 6 ellipses per Jitterbug. These 6 ellipses define 3 planes, 2 ellipses per plane. The planes intersect each other at 90 degrees. The 2 ellipses per plane intersect each other at 90 degrees.
For the “normal” Jitterbug motion, based on physical, rigid mechanical models, the vertices of the Jitterbug do not travel along the complete elliptical path.
The equation for the Jitterbug ellipse is
![]()
![]()
with 0° £ q £ 360° is the angle of rotation of the ellipse “radius” about the X-axis.
The semimajor axis is (EL = the edge length of the Jitterbug)
a = EL
The semiminor axes is
![]() .
.
The eccentricity of the ellipse is
 .
.
The coordinates for the 2 focus points in the (Y, Z) plane are
and
The equations used to convert a rotation of the ellipse radius by the angle q amount about the X-axis to the corresponding rotation of the triangle by the angle g amount about the V-axis and visa versa are
![]()
For the “normal” Jitterbug motion, -60° £ g £ 60° with g = -60° being the first Octahedron position, g = 0° being the VE position, and g = 60° being the second Octahedron position. The corresponding YZ-plane rotation angles of the ellipse radius is -45° £ q £ 45°.
The radial position of the Jitterbug triangle with respect to its rotation about the V-axis is given by
As the Jitterbug moves from the VE position to the Octahedron position, the vertices pass through first an Icosahedron position and then a regular Dodecahedron position.
The angular amount that a Jitterbug triangle is rotated (in either direction) from the VE position to the Icosahedron position:

The angular amount that the Jitterbug triangle is rotated (in either direction) from the VE position to the Dodecahedron position:
with -60° £ g £ 60°.
The Jitterbug triangles are scaled by the Scale Factor
![]()
![]()


References
Fuller, R. Buckminster, Synergetics, MacMillan Publishing Company, 1982
The folowing references were not used for writing of this paper. They were discovered only after I had done my own calculations and illustrations for this paper.
Angell, I. O. and Moore, M. "Symmetrical Intersections of Cylinders." Acta Cryst. Sect. A 43, 244-250, 1987.
Moore, M. "Symmetrical
Intersections of Right Circular Cylinders." Math. Gaz. 58,
181-185, 1974.